Origin-destination prediction using knowledge-driven deep learning framework
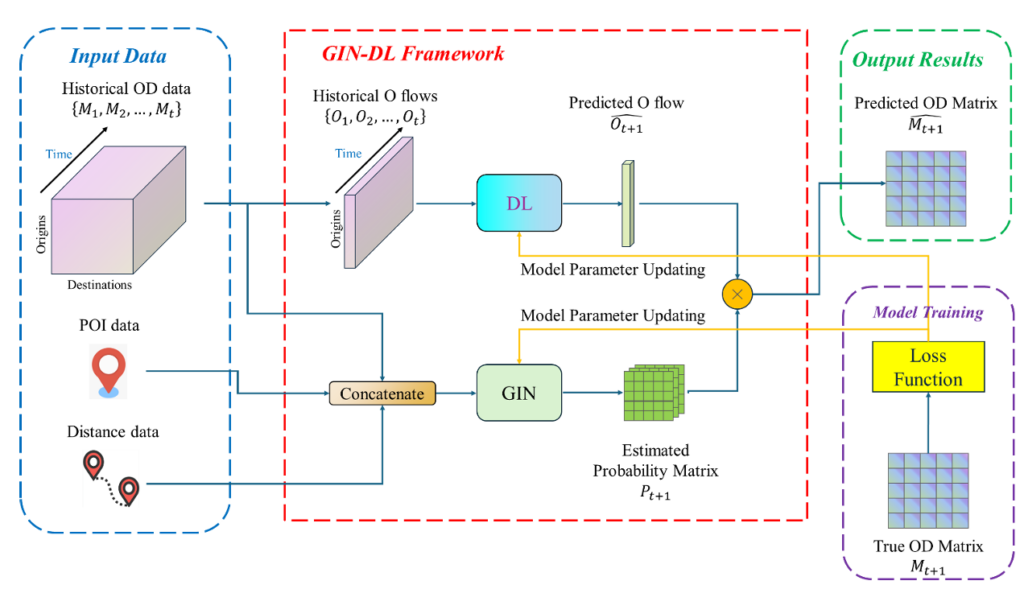
We propose a knowledge-driven deep learning framework that predicts real-time origin-destination matrices through a hierarchical process. First, a deep learning model predicts outflow, and then a gravity-inspired network estimates flow probabilities. The OD matrix is obtained by multiplying these predictions, significantly reducing model training time.
LLM-assisted algorithm design for simulation-based optimisation
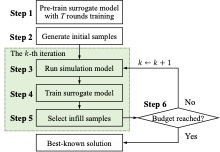
High-fidelity simulators are commonly used to evaluate transportation optimisation strategies, but their computational cost makes efficiency a key concern. This research leverages large language models to design computationally efficient optimisers, improving both the speed and adaptability of simulation-based transportation optimisation.
Traffic Signal Control Evaluation-Diagnosis-Optimisation Driven by AI and Digital Twin

This project aims to develop a digital twin platform for urban road traffic management, utilising emerging data sources and AI to enable real-time analysis and predictive modelling. The platform will integrate human-machine intelligence and establish a closed-loop system for traffic evaluation, diagnosis, and optimisation, aiming to alleviate congestion and create an efficient and effective platform for urban traffic management.
Deep Learning Surrogate-based Traffic Signal Optimisation
A novel deep learning surrogate function is developed to approximate and replace the simulation-based traffic signal performance function in signal optimisation. By incorporating a diversity mechanism, the solution quality of the extreme points of surrogate function is enhanced.
Transit Signal Priority Using Multi-Agent Reinforcement Learning

A Cooperative TSP strategy for the variable phase using multi-agent reinforcement learning for arterial roads was developed. This strategy aims to improve transit schedule and headway adherence by adjusting phase sequence and duration based on real-time traffic conditions. This method considers multiple conflicting bus requests, actions limited by domain knowledge, and rewards that balance the needs of buses and cars.
Network-level Traffic Prediction Considering Detector Reliability and Limited Training Data
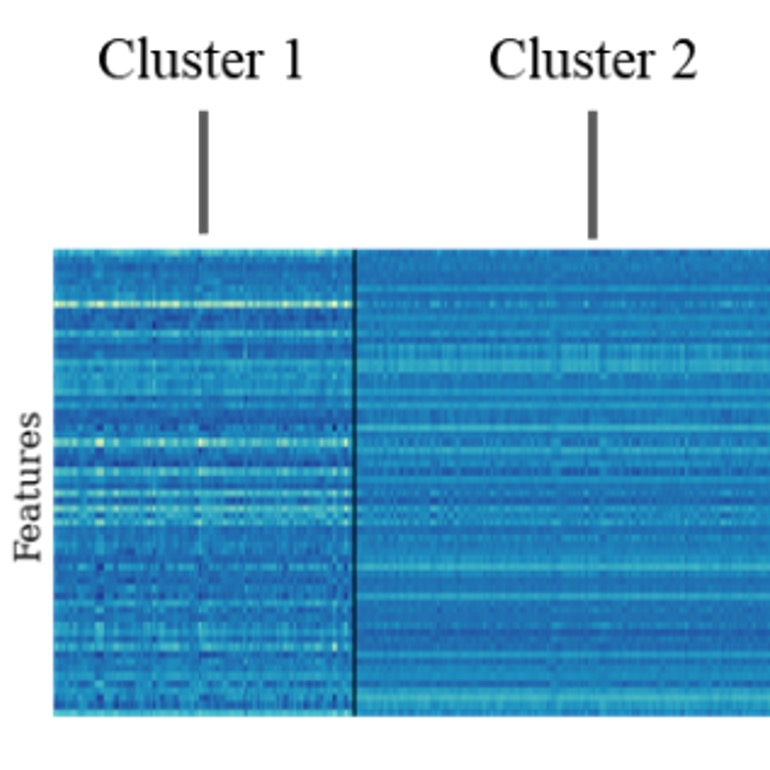
A framework for predicting network-level traffic volumes considering detector reliability, using long short-term memory and multilayer perceptron models, was developed. It introduces a deep profile model to learn and cluster detectors with similar signatures, allowing failed detectors to reference functioning ones within their cluster. A few-shot and transfer learning was incorporated into the framework for profile model learning when data was scarce.
Cooperative On-Ramp Merging for Connected Autonomous Vehicles

A model for cooperative on-ramp merging for connected autonomous vehicles (CAVs) was created to address merging conflicts at on-ramps. This mixed integer nonlinear programming (MINLP) model simultaneously determines lane change decisions, vehicle sequences, and trajectories at multi-lane freeway on-ramps. A Generalised Benders decomposition-based solution algorithm was developed to handle the complexities of multi-vehicle combinatorial optimisation and nonlinear trajectory optimisation.
Uncertainty quantification for traffic-related data prediction via deep learning
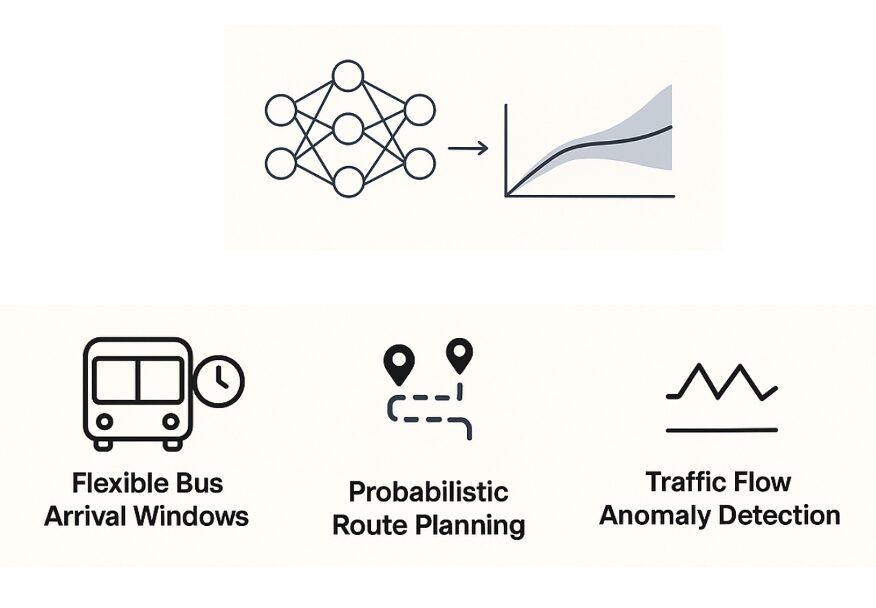
We are developing deep learning algorithms for traffic-related data prediction with integrated uncertainty quantification. The target data include bus arrival times, origin-destination (OD) patterns, and road segment-level traffic flows. By providing confidence intervals, our methods can assess the prediction reliability. This capability supports downstream applications such as generating flexible bus arrival windows, probabilistic route planning based on OD dynamics, and detecting anomalies in traffic flow.
Modelling People’s Movements with Bluetooth Sensor Technology

Bluetooth technology is widely used in various personal devices, making it possible to detect pedestrians using Bluetooth sensor technology. Bluetooth scanning offers a substantial sample size for researching pedestrian mobility. This project aims to model pedestrian mobility patterns in urban environments, providing insights into how individuals navigate and engage in activities within these areas.